弯道|用游戏第一人称视角考验智能驾驶?我们搞了台真车试了试( 二 )

文章图片
IM AD 很快就预测出黑车的加塞意图 , 放低速度并预留出足够的安全距离 , 让它先过 。
之后精准地识别出匝道线 , 平顺地转入匝道口 。
虽然这波操作很不“ 游戏 ” , 但鲫鱼喜欢这种绅士风范的稳重操作 。
其实因为有高精地图的加持 , 智己早在距离匝道口不远处就提前打好了转向灯 。
高精地图示意图 ▼
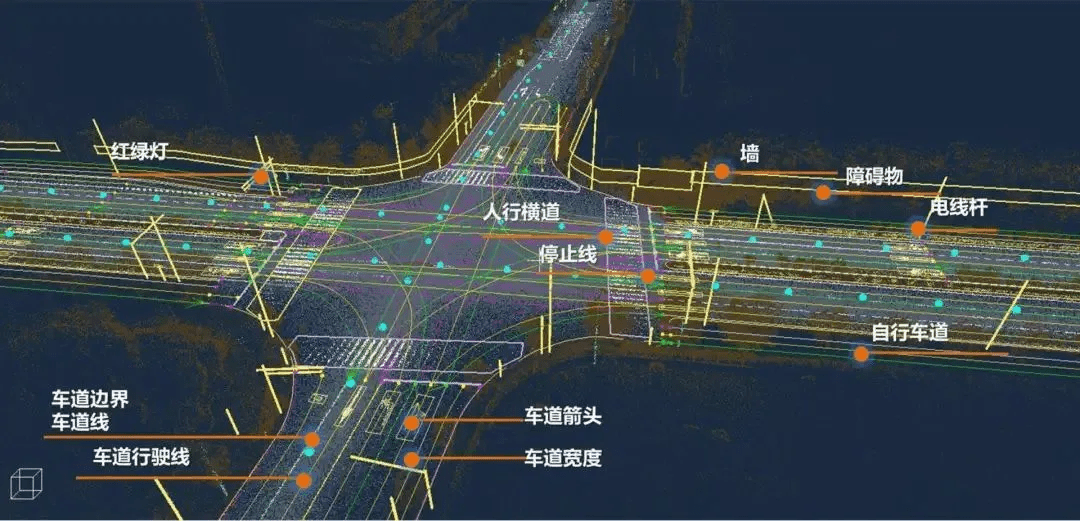
文章图片
既提醒后车注意 , 也避免了匝道口车辆过多可能错失变道时机的风险 。
但这个高精地图的威力还不止于此 。
比如面前这个大曲率的弯道 , 高精地图可以提前把这个弯道形状告诉 IM AD 智能驾驶系统 。

文章图片
应该把速度减到多少 , 方向盘打到多少才能转过这个弯 , 这些事情都提前计算好 。
除了大曲率的弯道 , 咱再来换个更严苛的场景 。
智己汽车在之前的成都路测时 , 还碰到一段魔鬼级考验的 U 形弯道 , 智己汽车不仅自己十分顺滑的通过 , 行驶速度也丝毫没有影响后续车辆的通行 。
话说 , 为什么 U 形弯道是魔鬼级的 。
文章图片
对于智能驾驶系统来说 , 近距离物体的探测大多依靠视觉 , 但视觉往往存在一定的滞后性 。
说白了就是摄像头看到障碍然后让系统做出转向动作的这会时间 , 可能就已经转不过去了 。
而在 U 形弯里 , 一辆车接着一辆车 , 大家的速度也都不低 , 你要是忽然卡住 , 很有可能会被后车追尾 。
文章图片
这时候就需要高精地图的辅助 。
在进弯之前提前算好速度和方向盘转角 , 避免视觉识别滞后性带来的智能驾驶系统卡壳 , 更不影响前后车的通行速度 。
回到杭州这边 , 我们体验完 IM AD 的温文尔雅 , 也是时候感受它“ 刺激 ”的一面——超车 。
文章图片
IM AD 如果识别到另外一条车道十分通畅 , 自己前车行驶速度又十分缓慢的情况下 , 就会做出变道超车的决策 。
转向灯一闪 , 丝滑转动方向盘的同时 , 循序渐进的加速 , 最后平稳的变道超车 。
并且 , 当右侧车辆是货车或大型工程车辆的时候 , IM AD 会在并排前进时有一个远离它的动作 , 确保安全 , 以防万一 。
推荐阅读












- TikTok游戏话题浏览时长上涨533%背后,中国厂商的出海新机会
- 王者荣耀:游戏按键皮肤改造,瑶妹遇见神鹿李信一念神魔
- 《2021年全球移动游戏玩家白皮书》,发掘移动游戏领域与TikTok间的新机遇
- 王者荣耀连续推出防沉迷措施,不能因为玩游戏荒废了自己一生
- 王者荣耀钟无艳不能当“大头兵”,出一个复活甲,其作用大于破军
- “你不用做家务,也不用帮我带孩子,因为我不是你的佣人”
- 当独立游戏被陈设在艺术馆中
- 不吃炖粉条了,用它做一道快手家常小炒,筋道爽滑又下饭
- 包菜、鸡蛋、虾仁和芝士,减肥期食用毫无负担
- 王者荣耀:正式服改名卡使用间隔时间由3天调整为15天